ロボットシステム統合における共同研究ワークフローのためのコンテナ化されたソフトウェア開発環境(SDE)のリファレンス実装です。
リファレンス実装
SDE論文の公式リファレンス実装です。


コンテナ化されたロボティクス
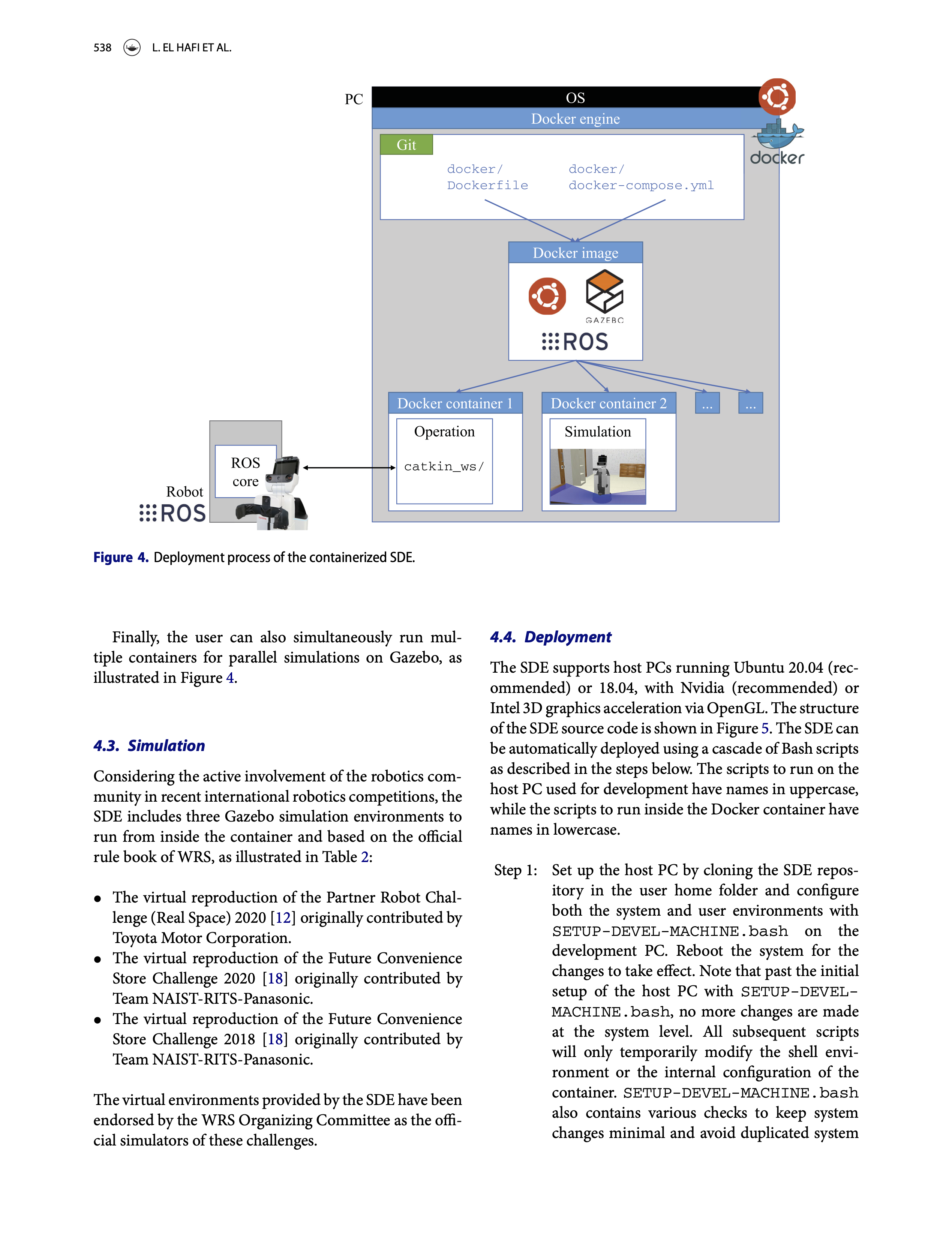
すべてのマシンで一貫した開発環境を提供します。
オープンソース
公開リポジトリでホストされています。貢献を歓迎します。
ミドルウェア統合
ロボットミドルウェアとシミュレーションの組み込みサポート。
グローバルコミュニティ
世界中の研究者や開発者によって使用されています。
高度なツール
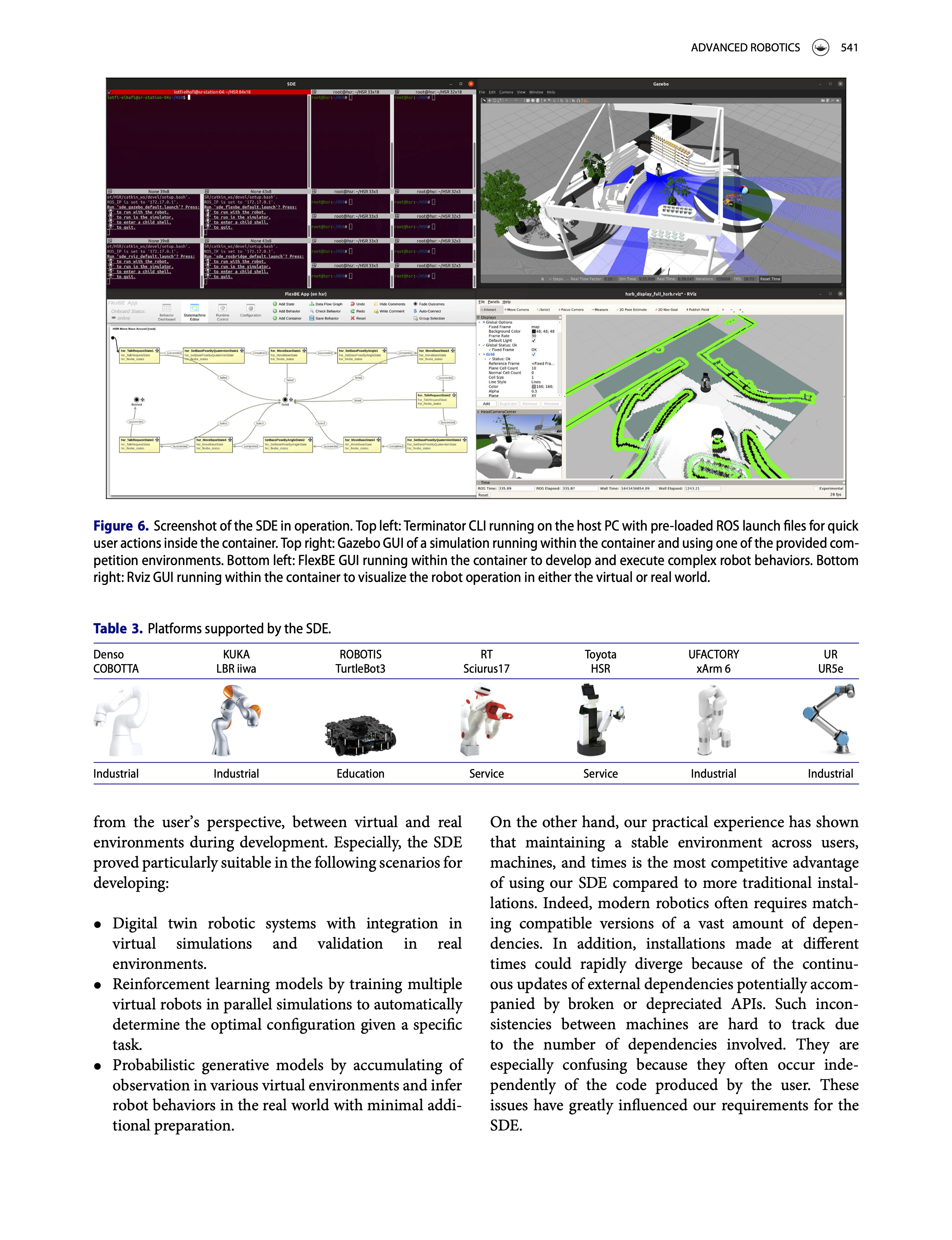
マルチターミナルワークフロー用のターミナルマルチプレクサとカスタムヘルパー関数が含まれています。
研究論文
研究でSDEを使用する場合は、これらの論文を引用してください。
L. El Hafi, G. A. Garcia Ricardez, F. von Drigalski, Y. Inoue, M. Yamamoto, T. Yamamoto, "Software Development Environment for Collaborative Research Workflow in Robotic System Integration", Advanced Robotics (AR), 巻 36, 番号 11, ページ数 533-547, 2022. DOI: 10.1080/01691864.2022.2068353 , 学術論文英語
L. El Hafi, T. Yamamoto, "Toward the Public Release of a Software Development Environment for Human Support Robots", Proceedings of 2020 Annual Conference of the Robotics Society of Japan (RSJ 2020), 巻 RSJ2020AC3E1-01, ページ数 1-2, (Virtual), 2020. URL: https://www.rsj.or.jp/data_acrsj/rom_data/g38-rom/pdf/3E1-01.pdf 学会発表英語
L. El Hafi, S. Matsuzaki, S. Itadera, T. Yamamoto, "Deployment of a Containerized Software Development Environment for Human Support Robots", Proceedings of 2019 Annual Conference of the Robotics Society of Japan (RSJ 2019), 巻 RSJ2019AC3K1-03, ページ数 1-2, Tokyo, Japan, 2019. URL: https://www.rsj.or.jp/data_acrsj/rom_data/g37-rom/pdf/3K1-03.pdf 学会発表英語
L. El Hafi, Y. Hagiwara, T. Taniguchi, "Abstraction-rich Workflow for Agile Collaborative Development and Deployment of Robotic Solutions", Proceedings of 2018 Annual Conference of the Robotics Society of Japan (RSJ 2018), 巻 RSJ2018AC3D3-02, ページ数 1-3, Kasugai, Japan, 2018. URL: https://www.rsj.or.jp/data_acrsj/rom_data/g36-rom/pdf/3D3-02.pdf 学会発表英語