ホーム»
Coarobo Viewport
物理ロボットとAIのための可観測性スタックであり、セットアップ不要でロボットデータをクラウド上で可視化、デバッグ、分析することを可能にします。
再生ボタンを押して、視覚化を開始してください。
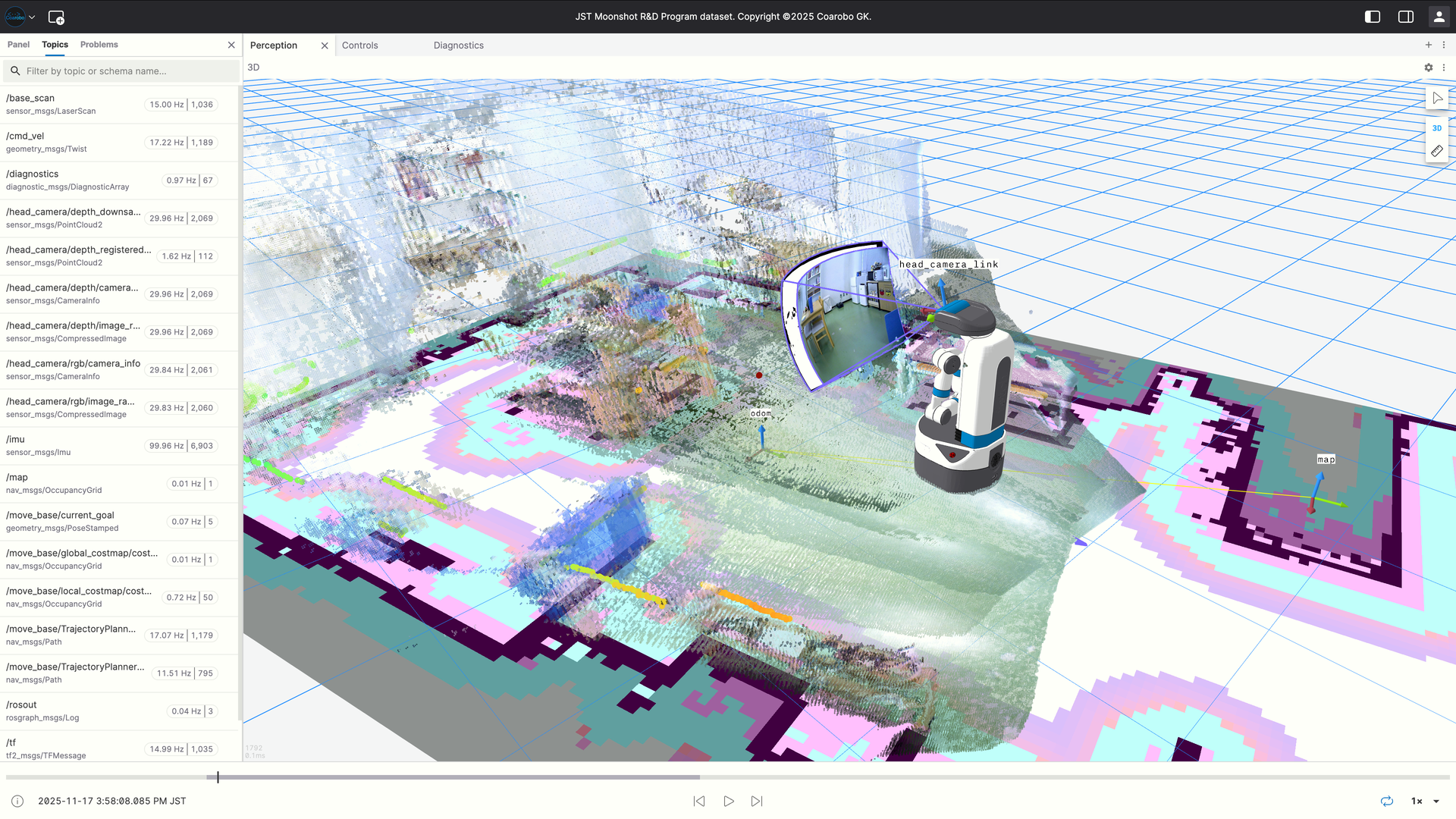
点群、マーカー、座標フレームを完全にインタラクティブな3D環境で可視化します。
コンテナ化されたサポートにより、可視化環境をクラウドで直接実行します。
Webブラウザを使用して、どこからでも、どのデバイスからでもデータにアクセスできます。
録画データを即座に再生し、問題のデバッグを迅速化します。
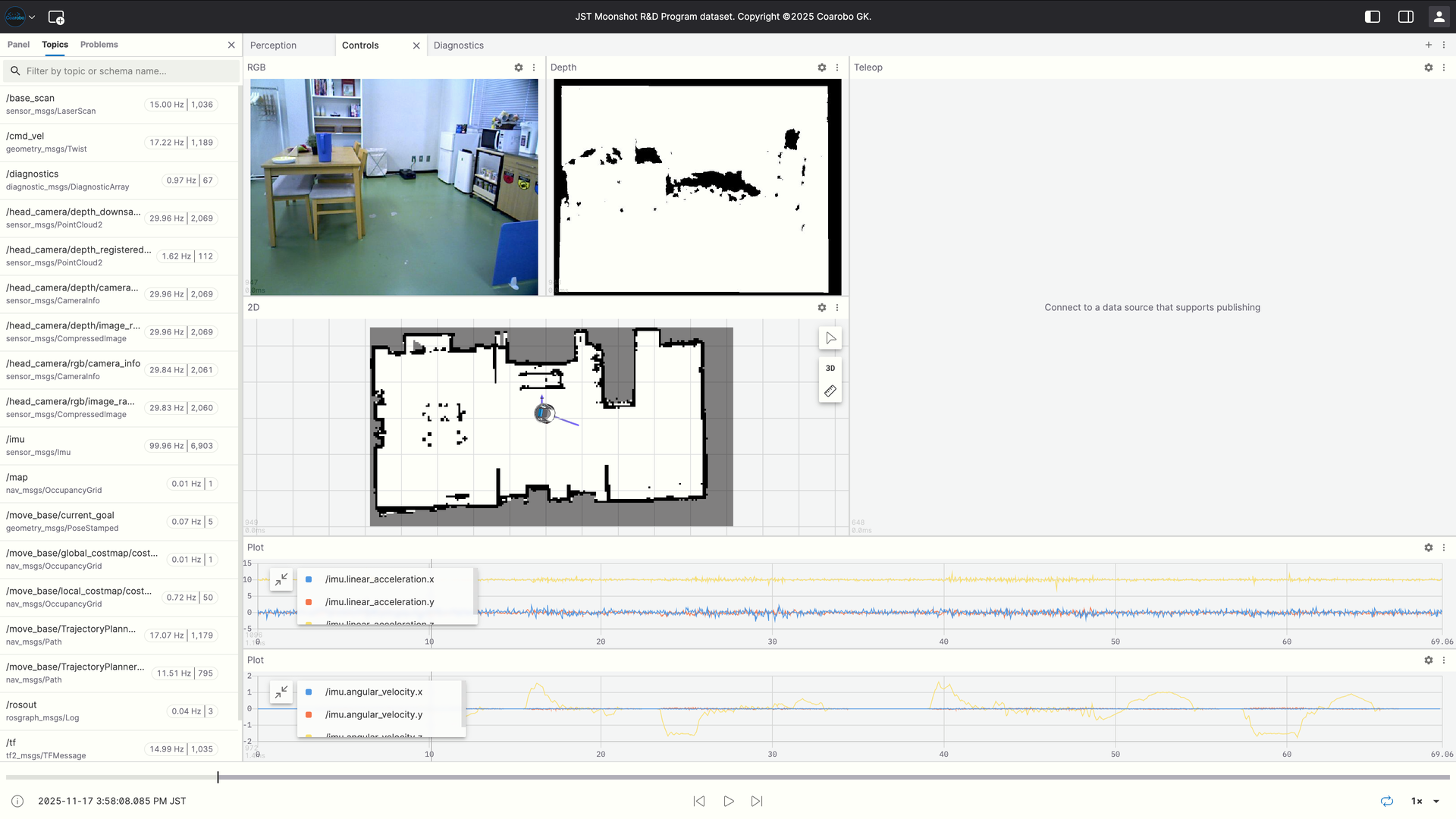
独自のパネルを作成し、ワークフローに合わせたレイアウトを構成します。
メッセージ値を時系列でプロットし、状態遷移を追跡してパフォーマンスを最適化します。
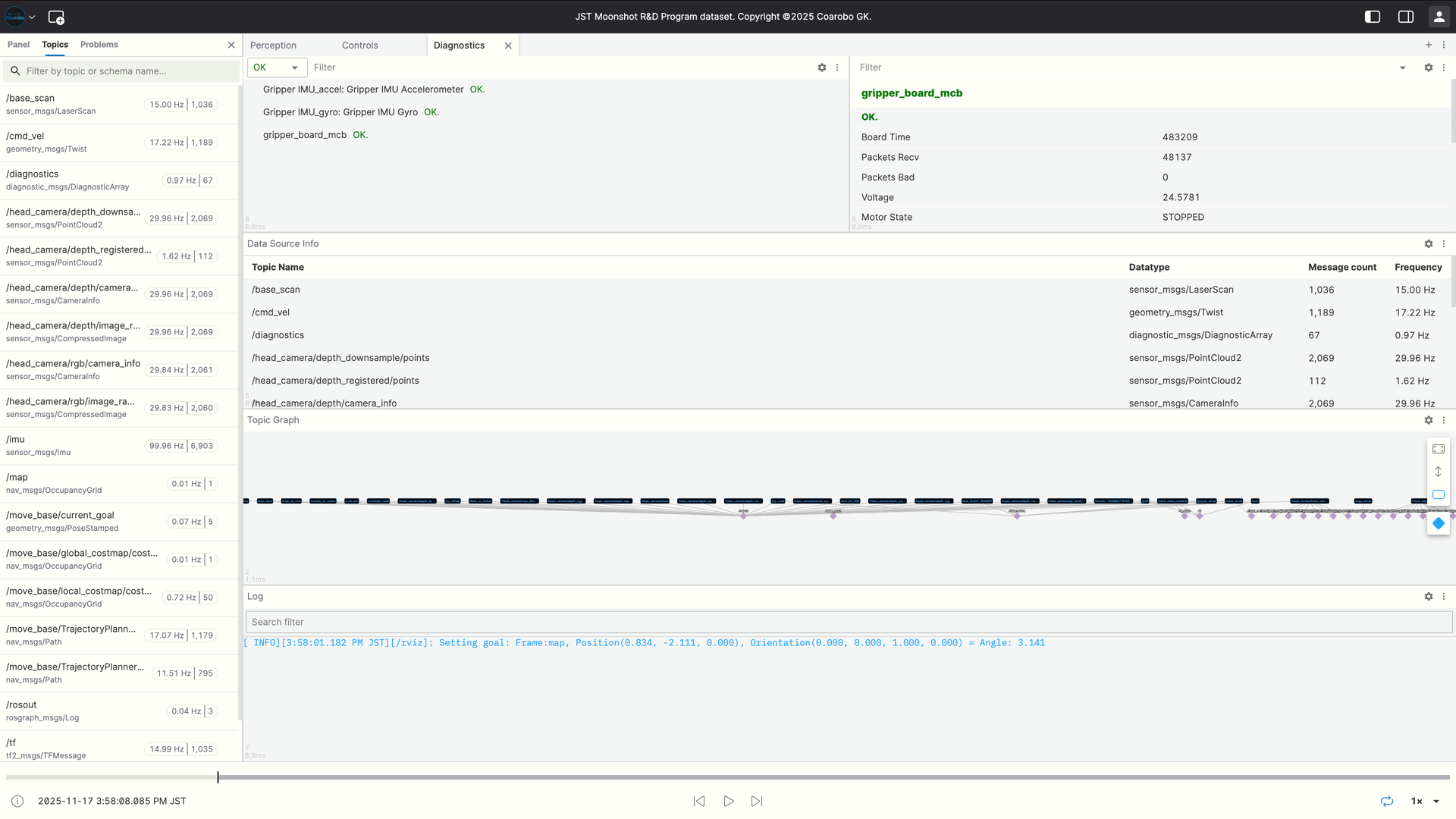
システムの健全性を検査し、生のメッセージを表示し、ログをフィルタリングして迅速なデバッグを行います。